



Overview
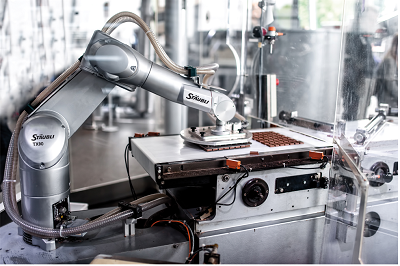
Stäubli has recently released the TX2-200 HE.
Stäubli’s TX2 range of robots is the only range of robots designed along European Hygienic Engineering Design Group (EHEDG) guidelines for hygiene and cleanability for open food handling, and related hygiene critical applications.
The TX2-200 is Stäubli’s largest robot, with a payload of up to 170kg and a greater than 2 metre reach. (2.2 or 2.6 metres depending on variant).
The Stäubli TX2 range features a vast array of class leading safety functions, all rated to ISO 13849-1 PLe.
Food Industry Features
Stäubli’s TX2 HE washdown range has the following features of great value to the food industry:
· Designed to be used un-covered within hygiene critical environments.
· Can be washed down using chemicals with a pH range of 2 to 12.
· Ideal for foam then pressure wash.
· Food safe H1 lubricants – with no performance derating or warm up required.
· IP67 with internal pressurisation unit.
· No need to use robot covers during operation or cleaning.
· Self draining after wash down.
· Minimal number of cover bolts to clean around.
· Bolts conform to EHEDG design criteria, including for ease of cleaning.
· Wash down compatible materials.
· Huge number of pre-approved cleaning chemicals.
· Test materials pack available to check newly released cleaning chemicals.
· All services under the robot base, outside of cell area.
· New robot base - completely smooth and sloped for draining with mounting bolts from underneath. Results in simple, fast, reliable cleaning.
· All services within the arm.
· User electrical and pneumatic loom from under robot base to wrist, to control end effector.
Safety Features
Safety to ISO 13849-1 Performance Level E (PLe) for:
· Safe Torque Off (STO)
· Safe Operating Stop (SOS)
· Safe Slow Speed – Joint and cartesian based.
· Safe Joint Position
· Safe Zone (cartesian coordinate based – keep the robot within a defined area to PLe reliability)
· Safe Tool (Cartesian coordinate based – keep the end effector within a defined area to PLe reliability)
· Intelligent use of these features with appropriate sensing and robot cell design allows for Robot Human collaboration.
Low Cost of Ownership
· Absolute encoders on each axis, with no backup batteries. Therefore no axis recovery procedures required.
· Infinite lifetime on Stäubli’s patented JCS gearboxes when used within design guidelines. (Can be checked dynamically using Stäubli’s Optimise Lab software)
· Use case dependent preventative maintenance schedule, based on your own actual application cycle and loads (Informed based on Stäubli’s Optimise Lab Software).
· Fast cleaning, using less water and chemicals, resulting in reduced waste water processing costs.
· Repeatable cleaning, with lower skilled workers, due to being designed specifically for easy cleaning.
· Don’t have to pay for robot covers, which need periodic replacement, usually up to 4 times per year. These then need to be disposed of, further increasing environmental impact.
· Stäubli HE food robots lower the chance of a hygiene critical incident occurring, which lowers the chance of an expensive and reputationally damaging product recall.
· Smaller robot controller and drives package – space saving.
Common Uses
The TX2-200 is the redesign of the TX200, which was previously Stäubli’s biggest robot offering. The TX2-200 will move into applications traditionally occupied by the TX200, with many more applications envisaged due to it’s increased market access from higher performance safety and hygiene. The TX200 is currently deployed as a food robot for:
· Red meat primary breakdown (usually sheep & pork).
· Red meat secondary breakdown and handling.
· Cheese processing and handling.
· Processed meat handling. (e.g. sausages and fish sticks)
· Fish processing.
· Bakery.
· Ready to eat meal production.
Points to Consider Regarding Robot Covers
Stäubli HE robots do not need covers for use in open food processing or handling, or other hygiene critical applications.
If one uses another type of robot that does need a cover, our feedback from former robot cover users include:
1. Covers have a significant upfront cost in themselves.
2. Covers add a significant operating expense, as often have to be changed 2 to 4 times per year. Plus create extra waste disposing of them.
3. Covers require fixings at the wrist and base to be designed. (Increasing footprint)
4. Deflector rings often need to be mounted on the robot arm, to keep the cover from rubbing directly on the robot.
5. Covers limit the work envelope of the robot, so is another limitation the robot programmer has to take into account.
6. Covers can easily have folds that hold cleaning or rinsing fluid. If not dried off carefully (time consuming) this fluid may run off onto the food being handled once back in operation.
7. Sealed covers invariably develop condensation inside them. The environment inside the cover becomes an ideal breeding ground for pathogens exacerbated by the heating and cooling of the air within the cover, by the robot during operation and shutdown periods.
8. If such a cover splits during operation, the line should be stopped, and as well as repairing or replacing the cover, the surrounding area of the machine or cell the robot is operating within must be deep cleaned. This significantly reduces OEE.
9. As an alternative to ‘sealed’ covers, some robot covers have a constant supply of air blown through them which have the following topics that need addressing:
a. Blower feeding the air must draw from a clean source, in case any air leaks out of the cover into the food zone.
b. Blower needs maintenance and monitoring for failure, as it is intended as a hygiene safety system.
c. Air duct needs to run from clean air source to robot cover.
d. If using compressed air instead of a blower, this creates an even more significant ongoing operational expense.
10. As covers wear, particles may come off them into the food being handled if not regularly inspected thoroughly.
11. Easy to snag cover on other parts of the line / cell it is operating in.
12. Speed often needs to be restricted to avoid excessive cover wear.
3-A Standard on Robot Covers (USA Standard)
‘3-A Sanitary Standard for Robot-based Automation Systems’ (Standard Number 103-00) Section:
G2 Robot Wiring / Dressing Considerations for Product Contact Surfaces
G2.1 Flexible robot covers shall not be used.
NOTE: The 3-A definition of 'product contact surface' is not literal, and is defined in ‘3-A Sanitary Standard for General Requirements, 00-01-2018’ as:
“All surfaces which are exposed to the product and surfaces from which splashed product, liquids, or material may drain, drop, diffuse {where applicable}, or be drawn into the product or onto product contact surfaces.”
NOTE: The EHEDG definition is very similar.
Robot Versions
1. Standard
2. HE (Humid environment, for Food Industry Wash Down, or other wet applications)
3. Plus other versions available within the TX2 range progressively released.
TX2 Family Common Properties
Those not mentioned in sections above:
· Class leading user friendly computer based programming and commissioning, using Stäubli Robotic Suite (SRS).
· Digital twin commissioning available within SRS.
· Colour touch screen hand controller.
· Very stiff mechanics, minimising settling time and therefore minimising cycle time.
· Small footprint robot controller, with pullout draw architecture for easy maintenance access.
· Option available to program the robot using industry leading PLC platforms. (Such as Siemens, Schneider, Beckhoff)
· Wide range of networking options to connect to other automation equipment, inhouse IT, or the cloud.
Summary
Stäubli’s TX2-200 HE now completes the replacement of the former Stäubli TX range of robots.
If you want:
· The easiest to clean robot, and only one designed along EHEDG Guidelines.
· Class leading PLe safety.
· To avoid the hygiene risks and cost of robot covers/bags
Call CNC Design today, to specify your Stäubli robot.
WEBSTORE LINKS BELOW
'MARKETING VOICE' VERSION OF TX2-200 BLOG
TX2-200 Blog Post in 'Marketing Voice'
VIDEO OF TX2-200HE BEING WASHED DOWN